Geometriaa matriiseilla
Contents
Geometriaa matriiseilla#
Matriisilaskentaa voidaan hyödyntää geometriassa. Tätä varten tarvitaan myös vektorilaskentaa. Jos vektorit ovat suunnikkaan sivuvektoreita, niistä voidaan muodostaa matriisi, jonka determinantti kertoo suunnikkaan koon. Toinen sovellus on koordinaatiston kierto. Tällöin koordinaatiston pistettä kuvaava vektori kerrotaan matriisilla, jonka alkiot määrittelevät kierron suunnan ja suuruuden.
Pinta-alojen laskeminen#
Vektorilaskennasta muistetaan, että jos suunnikkaan sivuvektorit ovat \(\vec{a}\) ja \(\vec{b}\), niin suunnikkaan ala on \(A_s=|\vec{a}\times \vec{b}|\) ja vastaavan kolmion ala \(A_k=\frac{1}{2} A_s\). Matriisilaskennan lähestymistapa asiaan on seuraava:
Jos suunnikkaan sivuvektorit ovat \(\vec{a}=x_1 \vec{i}+y_1 \vec{j}\) ja \(\vec{b}=x_2 \vec{i}+ y_2 \vec{j}\) ja ne täydennetään kolmialkioisiksi ja lasketaan ristitulo, saadaan
\(\vec{a}\times \vec{b} = \begin{vmatrix} \vec{i} & \vec{j} & \vec{k} \\ x_1 & y_1 & 0 \\ x_2 & y_2 & 0 \end{vmatrix} = (y_1\cdot 0 -y_2 \cdot 0) \vec{i} - (x_1 \cdot 0 -x_2 \cdot 0) \vec{j} + (x_1 y_2 -x_2 y_1) \vec{k}\).
Determinantin määritelmän perusteella voidaan kirjoittaa \(\vec{a}\times {b} = \begin{vmatrix} x_1&y_1\\x_2&y_2\end{vmatrix} \vec{k}\).
Suunnikkaan ala \(A_s\) on ristitulon itseisarvo, siis
\(A_s=\left|\begin{vmatrix}x_1&y_1\\x_2&y_2\end{vmatrix} \vec{k}\right|=\left|\begin {vmatrix} x_1&y_1\\x_2&y_2\end{vmatrix}\right|\),
ja kolmion ala on
\(A_k=\frac{1}{2} S = \frac{1}{2} \left|\begin{vmatrix}x_1&y_1\\x_2&y_2\end{vmatrix}\right|\).
Pinta-alat saadaan siis laskemalla determinantti matriisista, jonka riveillä ovat suunnikkaan sivuvektorien komponenttien kertoimet.
Esimerkki
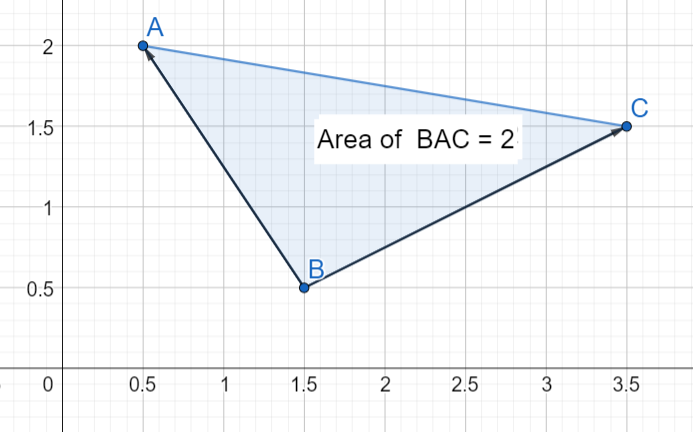
Kolmion kärkipisteet ovat \(A=(0.5,2)\), \(B=(1.5,0.5)\) ja \(C=(3.5,1.5)\). Laske kolmion ala.
Ratkaisu
Kun sivuvektoreiksi valitaan \(\vec{BA}=-\vec{i}+1.5\vec{j}\) ja \(\vec{BC}=2\vec{i}+\vec{j}\), niin kolmion alaksi saadaan
\(A_k=\frac{1}{2} |\begin{vmatrix}-1&1.5\\2&1\end{vmatrix}|= \frac{1}{2} |-1\cdot 1-2\cdot 1.5|=\frac{1}{2}\cdot 4=2\).
Sama tulos saataisiin myös, jos valittaisiin sivuvektoreiksi \(\vec{AB}\) ja \(\vec{AC}\).
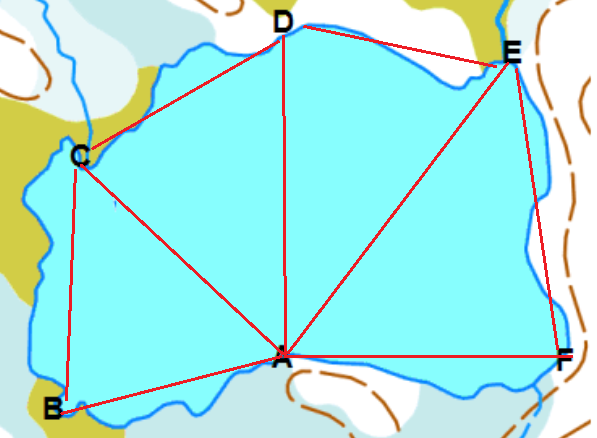
Epäsäännöllisen alueen pinta-alan määrittäminen onnistuu jakamalla alue useiksi kolmioiksi ja laskemalla kolmioiden pinta-alat edellisellä menetelmällä. Tästä syystä laskumenetelmää kutsutaan myös nimellä “maanmittarien kaava”.
Esimerkki
Lammen ympäriltä on mitattu koordinaattipisteet A = (810, 80); B = (500, 60); C = (550, 350) ; D =(820, 550); E =(1070, 530); F = (1090, 70). Arvioi lammen ala saadaan kolmioiden ABC, ACD, ADE ja AEF alojen summana.
Ratkaisu
Tarvitaan seuraavat sivuvektorit:
\(\vec{AB}=(500-810) \vec{i}+(60-80) \vec{j}=-310 \vec{i}-20 \vec{j}\)
\(\vec{AC}=(550-810) \vec{i}+(350-80) \vec{j}=-260 \vec{i}+270 \vec{j}\)
\(\vec{AD}=(820-810) \vec{i}+(550-80) \vec{j}=10 \vec{i}+470 \vec{j}\)
\(\vec{AE}=(1070-810) \vec{i}+(530-80) \vec{j}=260 \vec{i}+450 \vec{j}\)
\(\vec{AF}=(1090-810) \vec{i}+(70-80) \vec{j}=280 \vec{i}-10 \vec{j}\)
Lammen ala \(A_L\) muodostuu kolmioiden pinta-aloista:
\(A_L=A_{ABC}+A_{ACD}+A_{ADE}+A_{AEF}=\)
\(\frac{1}{2} \left|\begin{vmatrix}-310&-20\\-260&270\end{vmatrix}\right|+ \frac{1}{2} \left|\begin{vmatrix}-260&270\\10&470\end{vmatrix}\right|+ \frac{1}{2} \left|\begin{vmatrix}10&470\\260&450\end{vmatrix}\right|+ \frac{1}{2} \left|\begin{vmatrix}260&450\\280&-10\end{vmatrix}\right|=\)
\(\frac{1}{2} (\left|\begin{vmatrix}-310&-20\\-260&270\end{vmatrix}\right| + \left|\begin{vmatrix}-260&270\\10&470\end{vmatrix}\right| + \left|\begin{vmatrix}10&470\\260&450\end{vmatrix}\right| + \left|\begin{vmatrix}260&450\\280&-10\end{vmatrix}\right|)=\)
\( \ldots = 230 050 (\text{m}^2)\)
Octavessa lasku onnistuisi esimerkiksi seuraavasti:
AB=[-310 -20], AC=[-260 270], AD=[10 470], AE=[260 450], AF=[280 -10]
M1=[AB;AC], M2=[AC;AD], M3=[AD;AE], M4=[AE;AF]
ala=0.5*(abs(det(M1))+abs(det(M2))+abs(det(M3))+abs(det(M4)))
Lasku voidaan myös automatisoida siten, että mittauspisteiden määrää ei edes tarvitse tietää, vaan matriiseja muodostuu automaattisesti oikea määrä. Tällaista ohjelmointia voidaan harjoitella oppitunneilla. Koodeja täydennetään myös tänne myöhemmin.
Kiertomatriisit ja koordinaattimuunnokset#
Kiertomatriisit ovat matriisien sovelluskohteita niin kartoissa kuin kuvankäsittelyssäkin. Kiertomatriiseja käytettäessä pitää erottaa, kierretäänkö pisteen koordinaatteja paikallaan pysyvän origon ympäri, vai kierretäänkö koko koordinaatistoa paikallaan pysyvän pisteen ympäri.
Kun pistettä \(P(x,y)\) halutaan kiertää vastapäivään origon ympäri \(\alpha\) astetta, saadaan pisteen uudet koordinaatit kertomalla vanhat koordinaatit kiertomatriisilla \(T=\begin{bmatrix}\cos{\alpha}&-\sin{\alpha}\\ \sin{\alpha} & \cos{\alpha}\end{bmatrix}\).
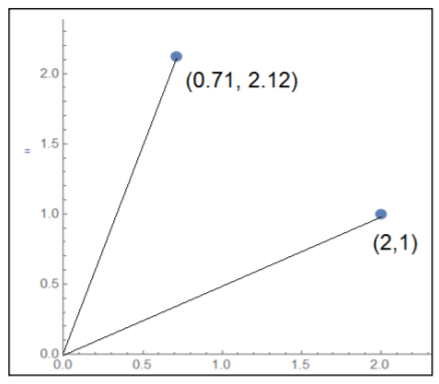
Esim. Pisteen (2,1) koordinaatit 45 astetta vastapäivään kierrettynä ovat \(\begin{bmatrix} \cos{45^{\circ}} & -\sin {45^{\circ}} \\ \sin{45^{\circ}} & \cos{45^{\circ}}\end{bmatrix} \begin{bmatrix} 2 \\ 1 \end{bmatrix}= \begin{bmatrix} 0.71 \\ 2.12 \end{bmatrix}\).
Myötäpäivään kiertämisessä kulmat ovat negatiivisia. Octavessa pitää käyttää komentoja sind ja cosd (d = degree, muuten Octave tulkitsee kulmat radiaaneina).
Kun koordinaatistoa halutaan kiertää vastapäivään origon ympäri \(\alpha\) astetta, saadaan pisteen koordinaatit uudessa koordinaatistossa kertomalla vanhat koordinaatit kiertomatriisilla \(T'\):
\(T=\begin{bmatrix}\cos{\alpha}&\sin{\alpha}\\ -\sin{\alpha} & \cos{\alpha}\end{bmatrix}\).
Esim. Pisteen (2,1) koordinaatit 45 astetta vastapäivään kierretyssä koordinaatistossa ovat \(\begin{bmatrix} \cos{45^{\circ}} & \sin {45^{\circ}} \\ -\sin{45^{\circ}} & \cos{45^{\circ}}\end{bmatrix} \begin{bmatrix} 2 \\ 1 \end{bmatrix}= \begin{bmatrix} 2.12 \\ 0.71 \end{bmatrix}\).
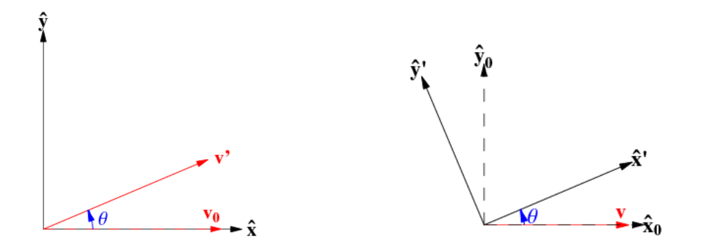
Vertaa kuvia: Vasemmalla vektorin \(\vec{v_0}\) kärkeä on kierretty kulman \(\theta\) verran, ja koordinaatisto on pysynyt paikallaan. Oikealla koordinaatiston akseleita on kierretty kulman \(\theta\) verran, mutta vektori \(\vec{v}\) on pysynyt paikallaan.
Kuvat ja lisätietoa: Wolfram MathWorld
Kolmiulotteiset kiertomatriisit määritellään erikseen \(x\)-, \(y\)- ja \(z\)- akselien suhteen:
\(T_x=\begin{bmatrix}1 & 0 & 0 \\ 0 & \cos{\alpha} -\sin{\alpha} \\ 0 & \sin{\alpha} & \cos{\alpha} \end{bmatrix}\), \(T_y=\begin{bmatrix} cos{\alpha} & 0 & \sin{\alpha} \\ 0 & 1 & 0 \\ -\sin{\alpha} & 0 & \cos{\alpha}\end{bmatrix}\), \(T_z=\begin{bmatrix} \cos{\alpha} -\sin{\alpha} & 0 \\ \sin{\alpha} & \cos{\alpha} & 0 \\ 0 & 0 & 1\end{bmatrix}\).
Lisätietoa kiertomatriiseista ja niiden sovelluksista Aalto-yliopiston materiaalista.
Yleisesti muunnoksia voidaan tehdä kiertomatriisien lisäksi siirtomatriiseilla ja skaalausmatriiseilla:
\(A_{\text{muunnos}}=A_{\text{skaalaus}} A_{\text{kierto}} A_{\text{siirto}}\).
Näitä operaatioita kutsutaan ns. affiinimuunnoksiksi. Muunnoksen tuloksena muodostuu alkuperäisen kuvion kanssa yhdenmuotoinen kuvio.